

























|
Explosive Ordnance Disposal (EOD) Robot, stop aluminium do samolotów, precyzyjna obróbka
Szczegóły Produktu:
| Miejsce pochodzenia: | CHINY |
| Nazwa handlowa: | HEWEI |
| Orzecznictwo: | YES |
| Numer modelu: | HW-18 |
Zapłata:
| Minimalne zamówienie: | 1 zestaw |
|---|---|
| Cena: | USD/SET FOB SHENZHEN |
| Szczegóły pakowania: | POKROWIEC NA KARTON |
| Czas dostawy: | 20 dni roboczych |
| Zasady płatności: | T/T |
| Możliwość Supply: | 10 ZESTAWÓW MIESIĘCZNIE |
|
Szczegóły informacji |
|||
| Materiał ciała: | Stop aluminium lotniczego, precyzyjna obróbka | Waga: | 92,8 kg (bez akcesoriów, opakowania i skrzynki kontrolnej) |
|---|---|---|---|
| Wymiar: | Długość 920mm * Szerokość 625mm * Wysokość 515mm | Bateria: | Akumulator kwasowo-ołowiowy DC24V |
| Czas pracy: | Nie mniej niż 5 godzin | Maksymalny zakres rozszerzenia chwytaka: | 255mm |
| Maksymalne rozłożenie ramion mechanicznych: | 1960mm | Rozszerzalna długość ramienia mechanicznego: | 500mm |
| Podkreślić: | sprzęt bombowy,sprzęt do eod |
||
opis produktu
Robot do unieszkodliwiania materiałów wybuchowych (EOD)
Model: HW-18
Przegląd produktów:
Robot EOD składa się z korpusu robota mobilnego i układu sterowania.
Korpus robota mobilnego składa się z pudełka, silnika elektrycznego, układu napędowego, ramienia mechanicznego, głowicy kołyski, systemu monitorowania, oświetlenia, podstawy zakłócacza materiałów wybuchowych, akumulatora, pierścienia holowniczego itp.
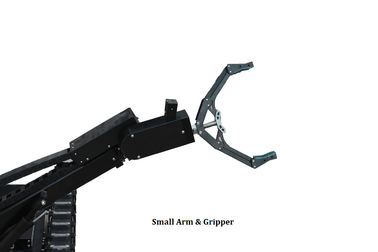
Ramię mechaniczne składa się z ramienia dużego, ramienia teleskopowego, ramienia małego i chwytaka.Jest montowany na niecce nerkowej, a jego średnica wynosi 220mm.Na ramieniu mechanicznym montowany jest podwójny drążek elektryczny i podwójny drążek pneumatyczny;Głowica kołyski jest składana.Pneumatyczny drążek usztywniający, Kamera i antena są zainstalowane na głowicy kołyski;System monitoringu składa się z kamery, monitora, anteny itp.;Jeden zestaw świateł LED z przodu i z tyłu korpusu;Ten system jest zasilany akumulatorem kwasowo-ołowiowym DC24V;System sterowania składa się z centralnego systemu sterowania, skrzynki kontrolnej itp.
Opcjonalny ekran dotykowy systemu sterowania jest odpowiedni dla początkujących w obsłudze.Opcjonalne akcesoria korpusu robota EOD: ogon, bezprzewodowa antena nadawcza, narzędzie sprzętowe (m.in. przecinak, hak, grabie, wiertarka i klipsownica).
![]()
Środowisko aplikacji
- Przenoszenie i niszczenie podejrzanych obiektów w miejscach publicznych (metro, lotnisko, dworzec kolejowy, galeria handlowa, centrum konferencyjne itp.)
- Stosowany w takich środowiskach jak eliminacja niewypałów, eliminacja bomb przydrożnych i eliminacja min itp.
- Pobieranie i przenoszenie materiałów w niebezpiecznym środowisku biologicznym i toksycznym.
- Rozpoznanie, wykrywanie, pobieranie materiałów i przenoszenie w środowisku ruin po
- katastrofa.
- Pobieranie i przenoszenie materiału w środowisku promieniowania jądrowego, prosta detekcja i
- Prace konserwacyjne.
Parametr techniczny
| Nazwa parametru | ParametrIndex |
| RobotBody | |
| Materiał korpusu | Stop aluminium lotniczego, precyzyjna obróbka |
| Waga | 92,8 kg (bez akcesoriów, opakowania i skrzynki kontrolnej) |
| Wymiar | Długość 920mm * Szerokość 625mm * Wysokość 515mm |
| Bateria | Akumulator kwasowo-ołowiowy DC24V |
| Czas pracy | Nie mniej niż 5 godzin |
| Maksymalny zakres rozszerzenia chwytaka | 255mm |
| Maksymalne rozłożenie ramion mechanicznych | 1960mm |
| Rozszerzalna długość ramienia mechanicznego | 500mm |
| Maksymalna prędkość ruchu | 1 m/s (Uwaga: pilot zdalnego sterowania, bezstopniowa regulacja prędkości. Maksymalna prędkość wynosi około 1 m/s w oparciu o baterię 24 V.) |
| Umiejętność klasy | Może wspinać się pod górę o nachyleniu 45° i zatrzymywać się stabilnie na zboczu. |
| Możliwość wspinania się po schodach | Dzięki wspomaganiu bez trakcji może wchodzić i schodzić po schodach o wysokości stopni 160 mm i nachyleniu pod kątem 45 °. |
| Pojemność nad przeszkodą | Może przekroczyć przeszkodę o wysokości 320mm. |
| Możliwość obracania | W poziomym podłożu cementowym lub nawierzchni bitumicznej robot może obracać się w prawo lub w lewo o 360º. |
| Ograniczona szerokość przejścia | ≥700mm |
| Możliwość obciążenia | 160KG |
| Możliwość przeciągania | ≥500N |
| Zdolność chwytania | 10/40 KG (rozciągnij i cofnij).Może poruszać się z obciążnikami dociskowymi 40KG i nie spadnie (rzeczywisty pomiar). |
| 6 mechanicznych ramion DOF |
Otwieranie i zamykanie chwytaka |
| Kąt obrotu |
Chwytak może obracać się zgodnie z ruchem wskazówek zegara i przeciwnie do ruchu wskazówek zegara o 360º; |
| Liczba kamer | 4 |
| Kamera do przodu | Kolorowa indukcja podczerwieni |
| Kamera cofania | Kolorowa indukcja podczerwieni |
| Głowica kołyskowa Różne kamery ogniskowe | Kolorowa indukcja podczerwieni |
| Kamera chwytaka | Kolorowa indukcja podczerwieni |
| Iluminacja | Dwugrupowy reflektor LED (każda grupa z przodu i z tyłu) |
| Odległość kontrolna | Sterowanie bezprzewodowe: ≥500m;sterowanie przewodowe: 100m (opcjonalnie 200m); |
| Skrzynka kontrolna | Za pomocą przycisków i uchwytu skrzynki sterowniczej operatorzy mogą sterować przełącznikiem wideo, powiększaniem, poruszaniem, obracaniem kołyski, oświetleniem, ramieniem teleskopowym, otwieraniem i zamykaniem chwytaka, obracaniem małego ramienia, podnoszeniem dużego ramienia, obracaniem miski nerkowej, obracaniem nadgarstka itp. |
| Skuteczność przeciwzakłóceniowa |
A. Zgodnie z testem wyładowań elektrostatycznych <testu kompatybilności elektromagnetycznej i techniki pomiarowej i testu odporności na wyładowania elektrostatyczne>, osiąga stopień 3 wymagań odporności; |
| Monitorowanie głowicy kołyskowej | |
| Modułowa konstrukcja | Głowicę kołyskową bez żadnego zewnętrznego połączenia można łatwo wyjąć z korpusu robota. |
| Nagrywanie wideo | Cradle może nagrywać wideo w czasie rzeczywistym, co ułatwia późniejsze oglądanie. |
| DOF kołyski głowy |
2 niezależne DOF, regulowana prędkość obrotowa: |
| OpracaCkontrolaTkońcowy | |
| Skrzynka kontrolna | Przenośny, wodoodporny, pyłoszczelny, o wysokiej wytrzymałości |
| Wymiar | ≤ Dł. 460 mm * Szer. 370 mm * Wys. 260 mm |
| Waga | ≤ 10 kg |
| Rozmiar wyświetlacza | 12-calowy wyświetlacz HB LCD, szeroki kąt widzenia, wyraźny obraz na zewnątrz |
| Operacja | Wysokiej jakości uchwyt kołyskowy, projekt interfejsu oprogramowania dla człowieka, łatwa obserwacja i wygodna obsługa |
| Pokaż obraz | Może monitorować 4 sygnały wideo jednocześnie lub oddzielnie wzmacniać jeden z 4 sygnałów wideo. |
| Wyświetlanie informacji | Symulacja w czasie rzeczywistym pokazuje informacje o prędkości robota, napięciu, postawie itp. |
| Bateria | Akumulator litowy 24 V, czas pracy ≥ 5,1 godziny przy pełnym naładowaniu. |
| Sterowanie ekranem dotykowym | Opcjonalne sterowanie za pomocą ekranu dotykowego jest odpowiednie dla początkujących. |
Przedstawienie firmy
W 2008 r. w Pekinie powstała firma Beijing Hewei Yongtai Technology Co., LTD. Skup się na rozwoju i eksploatacji specjalnego sprzętu bezpieczeństwa, służącego głównie prawu bezpieczeństwa publicznego, uzbrojonej policji, wojsku, służbom celnym i innym departamentom bezpieczeństwa narodowego.
W 2010 roku Jiangsu Hewei Police Equipment Manufacturing Co., LTD została założona w Guannan. Zajmując powierzchnię 9000 metrów kwadratowych warsztatu i budynku biurowego, ma na celu zbudowanie najwyższej klasy bazy badawczo-rozwojowej w zakresie specjalnego wyposażenia bezpieczeństwa w Chinach.
W 2015 r. w Shenzhen utworzono wojskowo-policyjne centrum badawczo-rozwojowe. Skupiając się na rozwoju specjalnego sprzętu bezpieczeństwa, opracowano ponad 200 rodzajów profesjonalnego sprzętu bezpieczeństwa.
Fabryka Jiangsu
![]()
![]()
Centrum Badawcze w Shenzhen
![]()
![]()
Wystawy zagraniczne
![]()
![]()
Certyfikaty
![]()
![]()
![]()
Zdjęcie personelu
Personel z fabryki Jiangsu
![]()
Personel z centrali
![]()
Personel z centrum badawczego Shenzhen
![]()